




L’automobile del futuro sarà autonoma, connessa e cooperativa. Già oggi il mercato offre modelli con avanzate funzionalità di guida autonoma. Un esempio è “autopilot” di Tesla. Seppur sotto il controllo continuo del guidatore, la vettura è in grado di seguire autonomamente la strada accelerando, rallentando e sterzando senza bisogno dell’intervento umano. Su una scala da 0 a 5 definita dalla Society for Automotive Engineers (SAE) dove 0 indica l'assenza di automazione e 5 l’automazione totale, autopilot è al livello 3. Esistono prototipi più sofisticati, nei quali l’attenzione del guidatore non è richiesta in modo continuo: il veicolo può prendere decisioni autonomamente anche in situazioni di emergenza. Tali vetture, non ancora disponibili sul mercato, raggiungono “solamente” il livello 4. La completa autonomia (livello 5) consente la guida anche in scenari imprevisti, ma per poter realizzare un sistema di questo tipo occorrono ancora anni di studi e ricerca.
I vantaggi dei veicoli a guida autonoma sono una miglior sicurezza, un maggior comfort e la possibilità di rivoluzionare la concezione dell’automobile grazie a nuove applicazioni. Ad esempio, con le auto completamente autonome potremmo veder sparire il concetto di “auto di proprietà”. L’automobile potrebbe semplicemente diventare un servizio e non essere più considerata come un bene. Quando serve, l’auto a guida autonoma viene prenotata attraverso e si “auto recapita” dal richiedente.
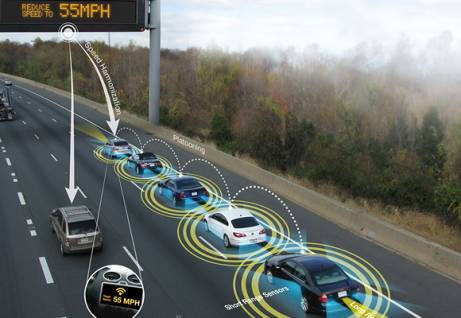
I veicoli a guida autonoma, tuttavia, non rappresentano l’ultimo passo verso una viabilità più sicura e più sostenibile, bensì il primo. Seppur dotati di sistemi tecnologici avanzatissimi, questi veicoli condividono una grossa limitazione con l’essere umano: il campo visivo e l'impossibilità di prevedere il comportamento degli altri utenti della strada. Per poter prendere decisioni di guida, un veicolo autonomo si serve di sensori come telecamere, sistemi radar e LiDAR (Light Detection And Ranging), ma tali sensori non sono in grado di vedere attraverso degli ostacoli, come edifici o altri veicoli, né di sapere in anticipo il comportamento degli altri veicoli o dei pedoni. Questa limitazione ha un grande impatto sull’efficienza e sulla sicurezza. Le distanze di sicurezza servono a ovviare alla limitata percezione: ad esempio un furgone può coprire la visuale anche dei sensori impedendo di reagire tempestivamente a una frenata di emergenza di fronte al furgone stesso.
Per rimediare a questo problema, l’automobile autonoma deve essere anche “connessa” e “cooperativa”. I veicoli, scambiandosi informazioni tramite collegamenti radio, potranno avere una percezione molto più completa dell’ambiente circostante, anche di quella porzione non direttamente visibile. Questo permette ai sistemi di guida di avere tempi di reazione ridotti migliorando la sicurezza e riducendo le distanze tra veicoli, aumentando di molto l’efficienza del traffico. Con la riduzione delle distanze fra gli autoveicoli diventa cruciale la precisione dei sistemi di misura. La precisione dei sensori può influenzare la sicurezza e la stabilità del sistema di controllo del veicolo. Nella nostra ricerca, ci serviamo di sistemi di simulazione per poter studiare il comportamento dei veicoli in caso di eventi avversi, come la perdita di informazioni nel canale radio o il superamento dei limiti fisici del veicolo. Per fare ciò, ci serviamo di modelli fisici e stocastici che implementiamo all’interno dei nostri simulatori. Nella letteratura scientifica, tuttavia, modelli stocastici per sensori sono difficili, se non impossibili, da trovare, poiché i dettagli implementativi sono coperti da segreto industriale.
Per tale motivo, in collaborazione con l’Università dell’Arizona, abbiamo sviluppato un modello stocastico di errore per un sensore laser (LiDAR) che possa essere integrato nei sistemi di simulazione. È stato analizzato un dataset di misure ottenute tramite un sensore laser estraendone le caratteristiche stocastiche. Utilizzando tali caratteristiche, è stato possibile creare un modello sintetico che riproduce gli errori di misura del sensore stesso. Quando il modello sarà ultimato consentirà l’analisi ancora più dettagliata dei sistemi di guida autonoma e cooperativa prima della loro effettiva introduzione sul mercato.
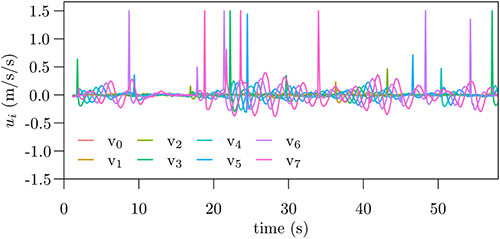
[Immagine tratta dall’articolo che mostra l’effetto degli errori di misura sull'accelerazione in un gruppo di macchine a guida cooperativa. I picchi di accelerazione dovuti al rumore sono ovviamente dannosi per il comfort e la sicurezza. I risultati sono stati prodotti utilizzando il simulatore Plexe dopo aver integrato il modello sviluppato nello studio]
La ricerca, ancora in una fase preliminare, è stata presentata alla conferenza internazionale IEEE Vehicular Networking Conference che si è tenuta dal 5 al 7 dicembre 2018 a Taipei. Lo studio dal titolo “A LiDAR Error Model for Cooperative Driving Simulations", di Michele Segata, Renato Lo Cigno, Rahul Kumar Bhadani, Matthew Bunting e Jonathan Sprinkle è stato ben accolto dalla comunità ed è valso agli autori il premio per il miglior articolo della conferenza.